ケンタウロス似の月面作業用ロボット、日本のスタートアップが開発
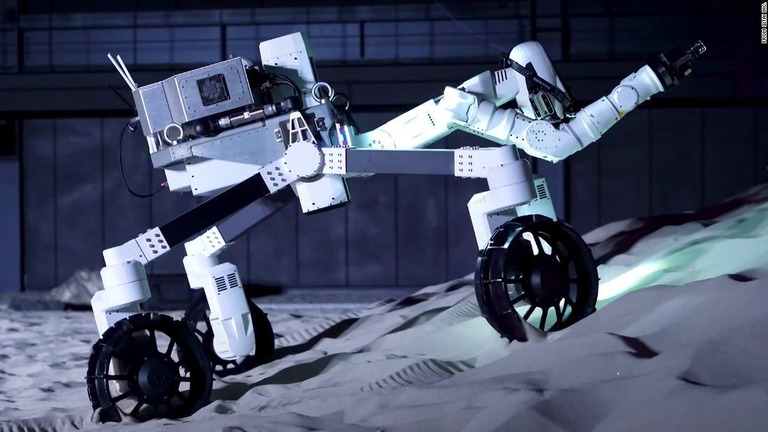
GITAIが開発した月面作業用ロボット「R1」/From GITAI Inc.
ニューヨーク(CNN Business) 日本のスタートアップ企業が、4本足のローリングロボットを開発した。外見がどことなくギリシャ神話に登場する半人半馬の種族ケンタウロスに似ているこのロボットは、先端に鉤爪(かぎづめ)のような形の手が付いた2本の腕、クモ形類のような胴体、突き出した2台のカメラの目を持ち、月面を移動できるように設計されている。
R1と呼ばれるこのロボットは、宇宙用作業ロボットを開発する日本のスタートアップ企業GITAIが宇宙航空研究開発機構(JAXA)と共同で設計・製造を行った。先ごろ、月面を模したJAXAの施設で行われた試験運用で、R1は四輪ででこぼこの地表で走り回り、クランプのような手を使って一連の部品の梱包(こんぽう)を解き、さらに太陽光パネルの基礎構造の組み立てに成功した。
GITAIは、これまで多様な目的のためのいくつかのロボットを開発しており、R1はその中の1つだ。GITAIのウェブサイトによると、同社の目標は2020年代半ばに自社の技術を実際の月面に持ち込むことだという。

GITAIが開発した月面作業用ロボット「R1」/From GITAI Inc.
またR1は、でこぼこした地形や丘をいかにうまく乗り越え、さらに月の表土のサンプルをいかにうまく収集できるかのテストを目的とした、いくつかの追加演習を行った。その様子を撮影した映像を見ると、R1はペンチのような形の手で小さなシャベルと透明な瓶を拾い上げ、ぎくしゃくした動きで月の模擬砂を少量収集している。
宇宙でのロボットの使用は決して新しいことではない。国際宇宙ステーション(ISS)には宇宙飛行士を補助するコンパニオンロボットがおり、そのロボットには日本製品を含む複数のロボットアームが付いている。また米航空宇宙局(NASA)は、これまで火星に何台かのロボットローバー(探査車)を送ったが、その中にR1のような漠然と擬人化された性質を持つロボットはなかった。
現在、米国とそのパートナー国だけでなく、中国やロシアも恒久的な月面基地の建設を急いでいる。そのため世界では宇宙で採掘や製造といったタスクを行うための新しい手段の開発競争が続いており、GITAIのR1もその一環として開発された。
月面基地があれば、月面であらゆる種類の事業活動や科学ミッションが可能になるため、現在、米国に拠点を置く多くの企業が、将来のミッションのためのさまざまなロボット、ローバー、月着陸船の開発に取り組んでいる。
宇宙探査のあらゆる面で米国の緊密なパートナーであるJAXAは、NASAと同様に民間委託の方針を取っており、競争と民営化が最先端の宇宙技術の発展を促進することを期待している。
GITAIの最高経営責任者(CEO)の中ノ瀬翔氏は、同社の目標は、宇宙ロボットの商業化を成功させ、宇宙労働のコストを今の100分の1に減らすことだとし、同社の成功は真の宇宙商業化に寄与すると確信していると語る。
同社は他にもいくつかのロボットを開発しており、いずれも宇宙での稼働を目的とした設計になっている。